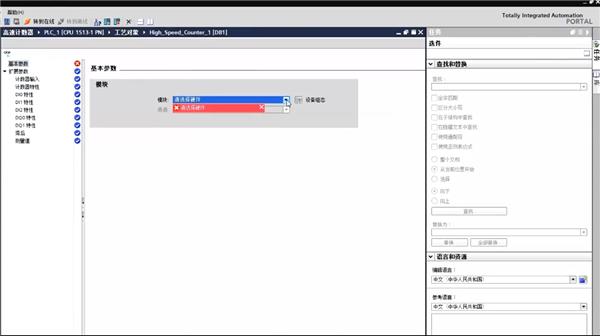
这一节我们将带您了解M100和M200控制器的高级指令:
高速计数器功能块的最大工作频率为 60 kHz。
加/减计数器将脉冲应用到物理输入,由物理输入 IB 的状态给出当前操作(加计数或者减计数)。
双相位计数器将编码器的 2 个相位应用到物理输入 IA 和 IB。
单加计数器将脉冲应用到物理输入 IA。
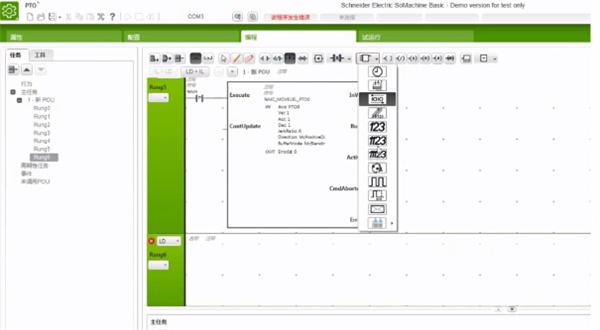
接下来我们来介绍一下PTO运动功能块,分别为:
MC_Power_PTO功能块:该功能块用于启用和禁用运动控制轴;
MC_MoveVel_PTO功能块:该功能块为速度模式功能块;
MC_MoveRel_PTO功能块:该功能块为相对定位模式功能块;
MC_MoveAbs_PTO功能块:该功能块为绝对定位模式功能块;
MC_Stop_PTO功能块:该功能块用于紧急停止;
MC_Halt_PTO功能块:该功能块用于正常停止;
MC_Home_PTO功能块:该功能块用于建立轴控制程序与轴机械定位系统之间的关系;
MC_SetPos_PTO功能块:该功能块用于修改运动轴的坐标位置值;
MC_ReadActVel_PTO功能块:该功能块用于读取轴当前速度;
MC_ReadActPos_PTO功能块:该功能块用于读取轴当前位置;
MC_ReadSts_PTO功能块:该功能块用于读取轴状态
MC_ReadMotionState_PTO功能块:该功能块用于读取轴的运动状态;
MC_TouchProbe_PTO功能块:该功能块可以实现类似于M218Movefast的功能,Probe输入可以看成是一个外部事件任务,Probe硬件输入信号来时立即触发一个PTO命令执行;
MC_AbortTrigger_PTO功能块:该功能块用于中断MC_TouchProbe_PTO功能,以及用Trigger模式的运动功能块;
MC_ReadAxisError_PTO功能块:该功能块用于读取轴错误;
MC_Reset_PTO功能块:该功能块用于复位所有轴错误;
MC_ReadPar_PTO功能块:该功能块用于读轴参数;
MC_WritePar_PTO功能块:该功能块用于写轴参数。



 2024/9/26
2024/9/26 人气(2828)
人气(2828) 星级(10)
星级(10) 评论(0)
评论(0)